


有限公司")
(1) 总体方案分析
实验目的:明确6DoF并联精密运动机构及其测控系统认知及设计需求。
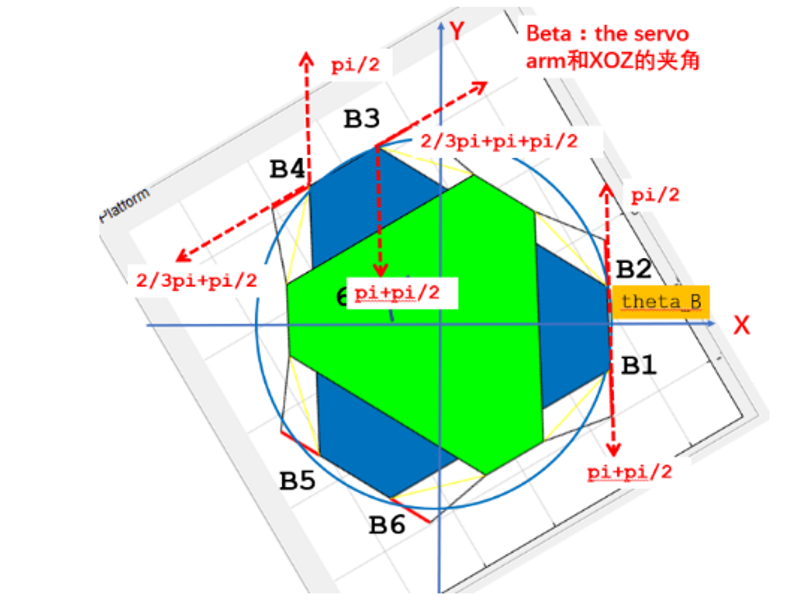
(2) 静、动平台空间坐标变换公式推导
实验目的:运用矩阵相关知识点,推导运动系统和6DoF并联精密运动机构空间变换矩阵;自学Matlab Simulink进行矩阵分析和计算;
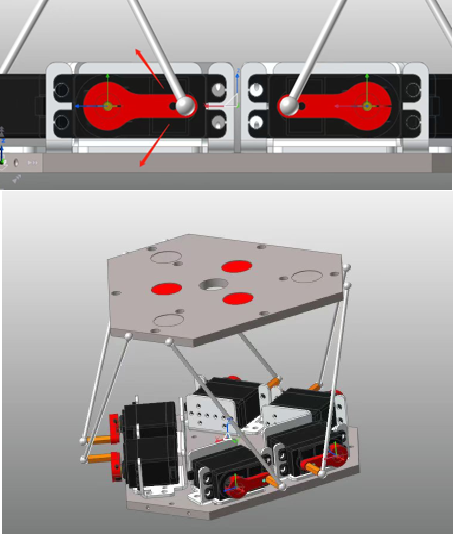
(3) 系统结构建模
实验目的:对6DoF并联精密运动机构零件进行拆解测量;在Solidworks 环境下完成建模;
(4) 空间坐标变换C实现
实验目的:静、动平台空间坐标变换计算公式的C/C++程序的编写和调试综合;
(5)6DoF并联精密运动机构被控机械本体结构单元设计
实验目的:基于理论力学力学与运动学知识,推导给定6DoF并联精密运动机构基本单元运动和力学计算式;
(6) 6DoF并联精密运动机构被控机械本体结构校核
实验目的:完成给定6DoF并联精密运动机构6DoF并联精密运动机构被控机械本体结构的强度校核。
(7)6DoF并联精密运动机构被控机械本体机构运动学分析
实验目的:完成给定6DoF并联精密运动机构运动学分析
(8) 驱动机构/传动机构选型与分析
实验目的:完成给定6DoF并联精密运动机构运动副:转动副、球铰/万向节传动分析计算
(9)系统描述建模与传递函数分析
实验目的:完成6DoF并联精密运动机构机电系统+板球系统的系统描述建模与传递函数分析
(10) 传递函数转换及PID参数整定
实验目的:能够将所建数学模型转化为传递函数,并能够完成PID控制系统仿真及参数整定,并实现电机位置与速度PID控制Matlab仿真。
(11) 单片机系统初始化设计
实验目的:能够完成平台的初始化及定时器编码器模式配置与编程与调试。
(12) 单片机串口通讯分析与调试
实验目的:能够完成平台陀螺仪、电阻屏的uart或IIC接口设备接程序设计和下载调试。
(13)单片机电机驱动分析与调试
实验目的:能够完成6路电机PWM驱动控制程序设计和下载调试。
(14)传感器选型及特性分析与调试
实验目的:能够针对被控系统需要的信号特征进行传感器的选型,并对所选传感器进行特性分析。
(15) 电机位置与速度PID控制分析与调试
实验目的:能够针对被控系统所选电机进行位置控制与速度控制。
(16)系统软硬件组装及功能验证
实验目的:整合前期所有任务知识点,实现球在板上运动的快速收敛。

有限公司")



 苏州工业园区仁爱路99号D115室
苏州工业园区仁爱路99号D115室有限公司")